In the rapidly evolving landscape of autonomous vehicle technology, researchers are continually pushing the boundaries of precision and stability in trajectory tracking. A recent study by Shantanu Rahman, Nayeb Hasin, Mainul Islam, and Golam Sarowar introduces a novel method that integrates lane detection with Model Predictive Control (MPC) to enhance the performance of autonomous vehicles. This innovative approach not only promises to improve road safety but also holds significant implications for industrial automation, farming, and military applications.
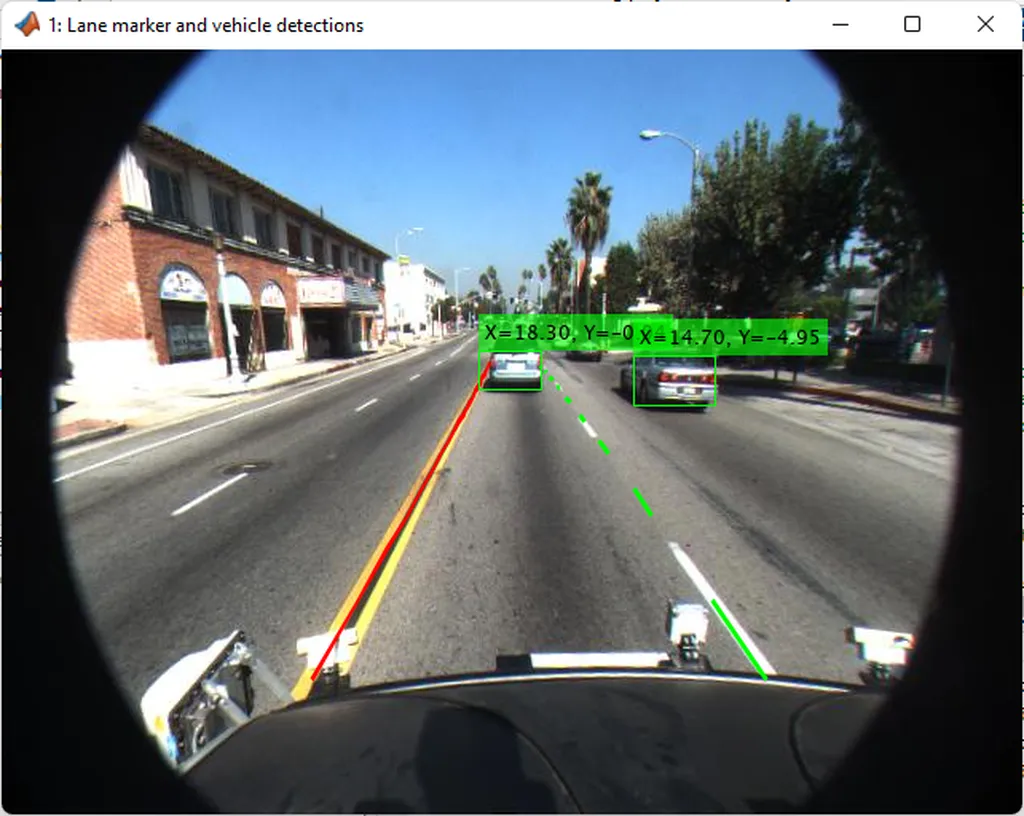
The research focuses on autonomous vehicles equipped with monocular cameras, leveraging advanced techniques such as edge recognition and sliding window-based straight-line identification for lane line extraction. By dynamically adjusting the region of interest (ROI), the system ensures accurate lane detection even in challenging driving conditions. This precision is crucial for the subsequent step, where an MPC controller, based on a bicycle vehicle dynamics model, is employed to follow the identified lane lines.
The integration of MPC with lane detection represents a significant advancement in autonomous vehicle technology. MPC is renowned for its ability to handle complex constraints and optimize control actions over a predictive horizon. By combining this with real-time lane detection, the researchers have developed a system that can adapt to varying road conditions and maintain precise trajectory tracking. This adaptability is essential for the safety and efficiency of autonomous vehicles, particularly in dynamic environments.
To validate the performance of their controller, the researchers created a single-lane road simulation model using ROS Gazebo. The simulation results were impressive, showing a 27.65% reduction in the root mean square error between the optimal tracking trajectory and the target trajectory. This reduction underscores the robustness and flexibility of the developed controller, highlighting its potential for real-world applications.
The practical implications of this research are vast. In the defence and security sector, for instance, autonomous vehicles equipped with such advanced control systems could enhance mission capabilities by ensuring precise navigation and maneuverability in complex terrains. Similarly, in industrial automation and farming, the ability to follow predefined paths with high accuracy can improve efficiency and productivity.
Moreover, the integration of MPC with lane detection sets a new standard for autonomous vehicle control systems. It demonstrates the potential of combining real-time data processing with advanced control algorithms to achieve superior performance. As autonomous vehicles become more prevalent, such innovations will be crucial in ensuring their safe and effective operation.
The research by Rahman, Hasin, Islam, and Sarowar represents a significant step forward in the field of autonomous vehicle technology. By integrating lane detection with Model Predictive Control, they have developed a system that enhances the precision and stability of trajectory tracking. This innovation not only promises to improve road safety but also has broad applications in various sectors, including defence, industrial automation, and farming. As the technology continues to evolve, such advancements will be instrumental in shaping the future of autonomous vehicles. Read the original research paper here.